※デジタルGセンサーシリーズの最高峰です※
IMUシリーズは・Gセンサーの届かない領域を、コントロールします・・・
IMU 慣性計測装置(英語: inertial measurement unit)
GTRの純正Gセンサーは 約30年前に開発されたアナログ式のセンサーです。
Gセンサー(加速度センサー)は、加減速や左右のG(加速度)に応じて出力します。
特にアテーサ初期の32GTR系は、ケース内でオイル漬けの金属製の振り子が揺れる量を計るため、反応速度が遅く、揺り返しなども生じるために精度が限定的でした。そのため、スタート時に大きなタイムラグを生じて4WD化したり、コーナの出口でやっとフロントトルクがかかったりするなど、初期反応の遅れや動作の遅延が顕著でした。
デジタルGセンサーは 最新のMEMS(Micro Electro Mechanical Systems)センサー(シリコン基板上に微細加工技術によって集積化したセンサー)を採用することにより、リアルタイムなレスポンスと高い精度を実現しました。
・最新のIMU技術
IMUは、航空機や新型車の姿勢制御に使用される、動体の姿勢変化を検出する新しい技術です。
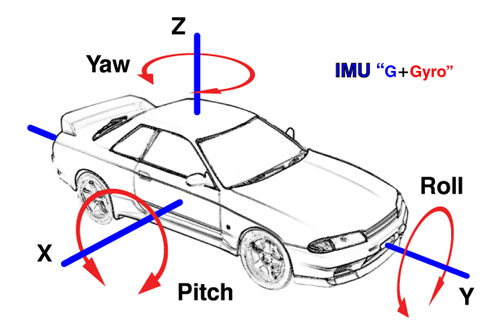
新型の「デジタルIMUセンサー」は、Gセンサーの「加減速のG、横G」が発生してから反応する弱点を補うため、前後のピッチ、左右のロール、ドリフトのヨーを検出する「ジャイロセンサー」を追加し、6DoF(6自由度) IMUセンサーとしました。
例えば、スタートはテールが沈んでから加速しますが、ジャイロはG変化より早く、テールが沈むピッチの変化で加速を検出できます。コーナーリングでは車体の左右の傾き「ロール」、さらに車体が進行方向を変える「ヨー」の変化や、横滑りの「ドリフト状態」も判断することが可能です。
ジャイロセンサーだけでは、加速度(G)を測ることができません。
従来のGセンサーとジャイロセンサーをコンビネーションして「車体の振る舞いを検出するIMU」とすることにより、車両の姿勢変化も利用する「リアルタイムで高精度な、従来にない4WDアテーサ制御」が実現しました。
発進加速時のより早い4WDへの移行、ハードブレーキ時のより早い4WDへの移行と維持、加速から減速への変化に追従する4WD制御。ステアリング操作のロールにも追従する素早いフロントトルク変化、ドリフト状態判断による4WDへの移行など、従来では不可能だった4WD制御が実現しました。
 MEMS ジャイロセンサー MEMS ジャイロセンサー
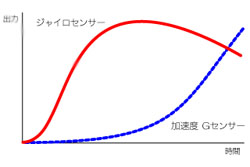 Gセンサーとジャイロセンサー出力特性の比較。 Gセンサーとジャイロセンサー出力特性の比較。
・R32用カプラーオンハーネス付属

(純正Gセンサーのコネクターと同じ形状か確認して下さい)
デジタルIMUセンサーは車種にあわせて最適化されています。
また、従来とは異なる制御を行っているため、調整式アテーサコントローラーと併用しないで下さい。
デジタルIMUセンサーのメンテナンスにつきましては、それぞれ販売されている各社様にお問い合わせください。
|